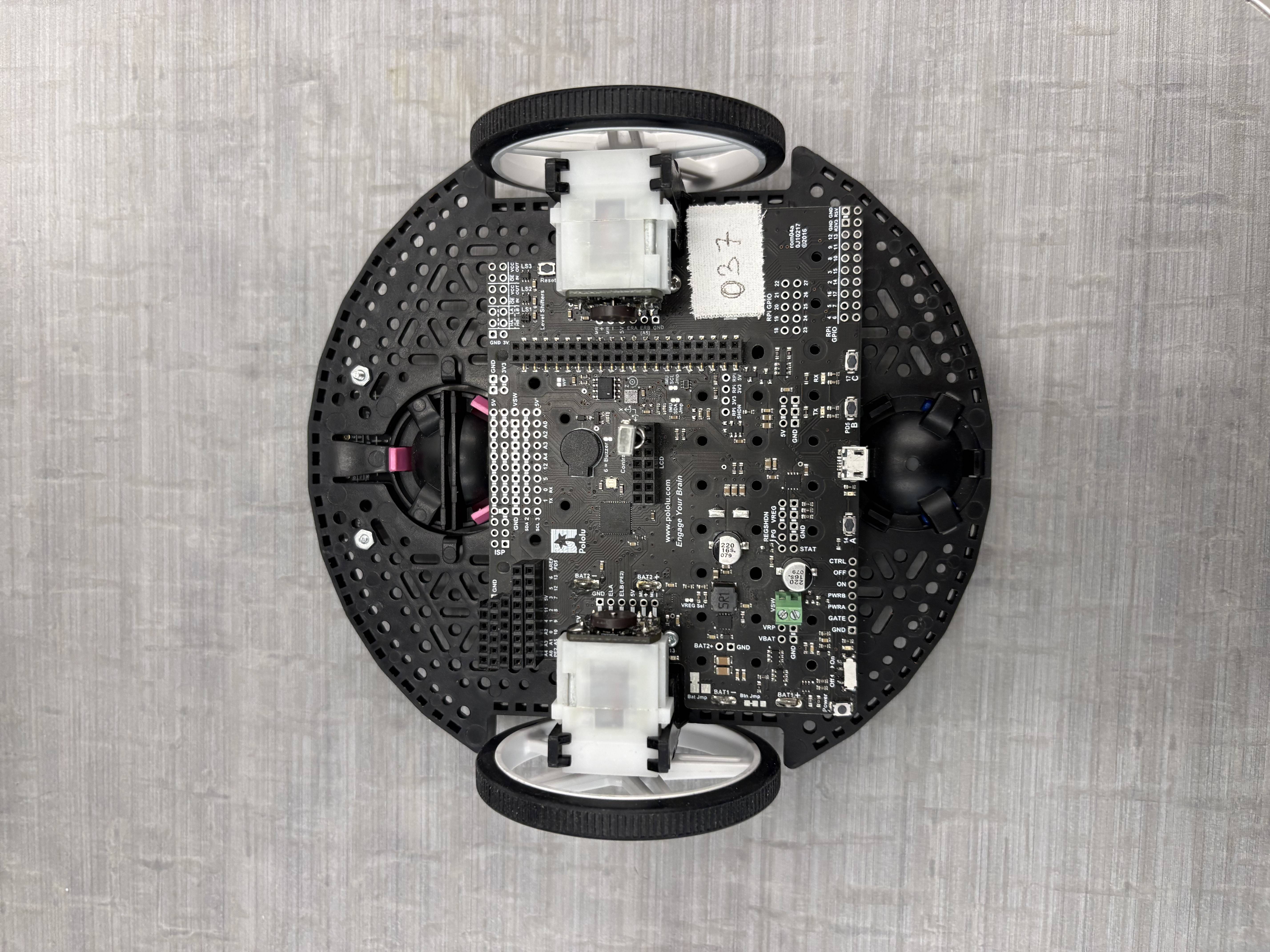
Pololu Romi Robot
A small robot that uses computer vision, kinematics, and sensor fusion for autonomous navigation and task completion.
Duration
2 months
Role
Student
Team Size
2-3 members
Overview
This was a long-term class project for WPI's RBE2002 course, which focuses on sensing. We used a Pololu Romi robot, and completed tasks such as lifting a basket and weighing it, navigating to specific coordinates based on AprilTag markers, and applying inverse and forward kinematics for movement tracking.
Major concepts use include PID control, op-amps and filters, computer vision, and state based control.
Technical Approach
The romi was coded using C++, which allowed for integrating various sensors and libraries. Key components included:
- Computer Vision: OpenMV camera for april tag detection.
- Sensor Fusion: Fusing readings from both a gyroscope and accelerometer using a Complementary Filter. This was used for forward and inverse kinematics.
- Motor Control: PID controllers for precise movement.
Results
The robot was able to complete all assigned tasks with a high degree of accuracy and reliability. An IR remote was used to command the robot to go to specific locations. It was also able to detect april tags on baskets, and either pick up the basket, if an arm was attached, or drive up to it.
Videos
See videos of the robot in action: